Étape 2: Déterminer le brochage moteur



Avec donc beaucoup de fils il est tellement variance en connectant tous un peut rapidement être table flip embêtés. Alors que le brochage est relativement facile de déterminer pour moteur bipolaire à 4 broches, il n’est pas tellement donc pour 8 broches. Mais ne soyez pas effrayé par la nouvelle largeur de barbe des fils du moteur, il est tout résoluble par chaque outil résident de boutique électronique – oscilloscope. (Si tu n’as pas un - obtenir un).
Tout d’abord, vous devez déterminer les extrémités de la bobine. Dans 8 broches il y a 4 bobines avec des épingles de 2 queues, ce qui vous donne 4 * 2 = 8, duh. Prenez votre multimètre et basculez en mode de mesure de la résistance. Logique est simple : les fils qui n’appartiennent pas à la même bobine vous ne donnerait aucun lien tandis que les fils qui sont les queues de la même bobine vont vous montrer une résistance faible (~ 70 ohm dans mon cas). Faire une liste: A B C D pour bobines et la paire numéro d’épingles. Comme ça:
A = 1 7
B = 2 4
C = 3 6
D = 5 8
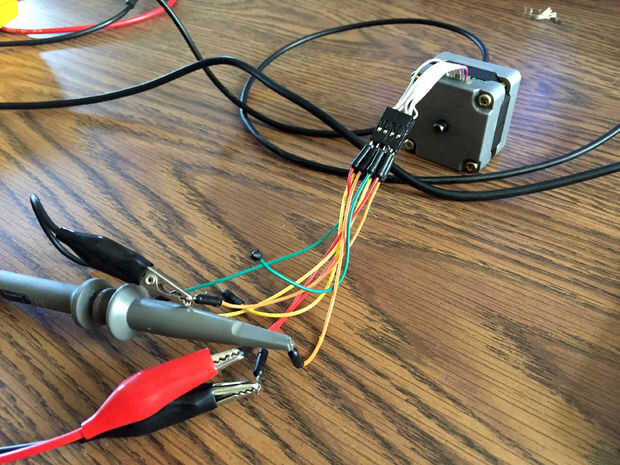
Ensuite, il faut déterminer l’emplacement de chaque bobine interne du moteur. Je sais que nous pourrions simplement ouvrez-le et prendre un wouf, mais il s’agit: a) pas de plaisir, fils b) il sont poils mince et se ressemblent et c) j’ai déjà allumé un oscilloscope ici. Brancher canal 1 de l’étendue à une paire d’aléatoire aléatoire polarité. Fiche canal 2 à une autre paire au hasard dans un autre polarité aléatoire. Et maintenant, donne au moteur une légère rotation dans quelle direction. Comme on m’a dit par une grosse dame dans mon cours de physique de grade 6, tourne un aimant permanent près d’un conducteur génère un courant dans ce chef d’orchestre – c’est exactement ce que nous allons voir sur le champ d’application : deux motifs ondulés.
Il existe trois options de ce que vous allez voir :
- Deux lignes seront en synchronisation qu'essentiellement, cela signifie vous avez trouvé en face de bobines qui sont assis contre l’autre, mais tu as la polarité de l’un d'entre eux en arrière.
- Deux lignes sont battant dans les directions opposées exactes, c’est la même chose, mais cette fois vous avez compris le droit de polarité.
- Les lignes sont légèrement désynchronisés que cela signifie bobines sur que vous se penchent s’asseoir de l’autre de 90 degrés.
Si vous, dire, mettez ch1 sonde A de la bobine et ch2 sur bobine D pour obtenir cette photo, cela signifierait bobines sont situés comme ça dans un moteur :
Il ne pas vraiment important si il s’agit d’une image exacte de comment les bobines sont trouvent dans le moteur à partir du haut vers le bas – tant que toutes les positions relatives sont déterminées à moteur tournera.
Maintenant, après que vous avez trouvé chaque bobine dans le moteur par rapport à l’autre, il est temps de comprendre les polarités de ces bobines. Encore une fois, comme avec les postes – tout est relatif alors il importe peu si vous obtenez le moteur entier en arrière – tant que toutes les contraintes de polarité relative sont respectées le moteur sera chooch très bien. Cela dit, prenez une pelote aléatoire et tout à fait arbitrairement appeler une de ses extrémités un + et un autre a-. Marquez-les sur la table de brochage :
1 = A +
7 = A -
Maintenant, mets un canal 1 de l’étendue dans la polarité, que vous avez juste guesstimated et le canal 2 de la bobine qui se trouve sur le côté opposé du moteur contre elle en polarité arbitraire. Tourner légèrement le moteur vers la droite. Il est important de tourner moteur seulement dans une direction pour ne pas contourner les conditions d’essai. Si vous voyez graphique absolument synchrone sur le champ d’application – vous avez branché la bobine 2 dans la même polarité, signifie quel que soit votre portée si connecté à est la bonne polarité. Si deux graphiques que vous voyez sont totalement opposées – votre polarité sur le canal 2 de la portée est en arrière (pas une mauvaise chose). Maintenant, vous pouvez mettre les polarités pour la deuxième bobine dans le tableau :
5 = D -
8 = D +
Maintenant, vous devez déterminer les positions relatives des enroulements secondaires. C’est la bobine C à gauche ou à droite sur la bobine D dans mon exemple.
Déterminer, il est assez facile : Si vous mettez un champ d’application canal 1 sur bobine A en ce qui concerne les polarités que vous avez déterminé et le canal 2 sur bobine C dans une polarité arbitraire, vous verrez un graphique #3 sur les photos : deux graphes sont désynchronisées de 90 degrés. Et voici la partie la plus délicate : Si votre graphique du canal 2 (celui avec les polarités arbitraires) vient avant le canal 2, alors vous avez la polarité droite. Si pas – vous l’avez en arrière (encore une fois, pas une mauvaise chose).
Maintenant, vous le mettez tous à la table de brochage et c’est maintenant terminée !
1 -.
2 B +
3 -.
4 -.
5 -.
6C +
7 A +
8 D +
Méfiez-vous que mon moteur brochage est comme ça, cela ne signifie pas que vôtre doit être tel. En effet, quiconque est familier avec mon niveau de compétences soudure dirais mon brochage est bizarre (et probablement vous conseille de tout de mon instructables, vous fiez ne pas trop).





![Contrôle des moteurs pas à pas bipolaire avec Arduino [sans bibliothèque]](https://image.tubefr.com/thumb/170x110/5/87/587864a8efe29028e8562de52b3ccc03.jpg "Contrôle des moteurs pas à pas bipolaire avec Arduino [sans bibliothèque]")







