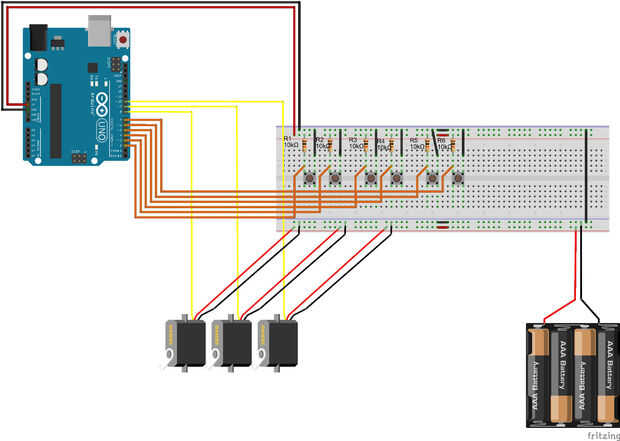
Dans ce projet, je me suis fixé la tâche de contrôler le mouvement des 3 servomoteurs en appuyant sur les commutateurs de bouton poussoir. Mon intention est d’utiliser ces boutons pour contrôler le mouvement d’un bras de robot 3-servo.
Ce que je veux faire :
1. je veux commander un servo à l’aide d’une paire de boutons, un pour tourner vers la droite, un à tourner dans le sens anti-horaire
2. Si vous appuyez et maintenez enfoncée une touche, un servomoteur se déplace dans le sens horaire jusqu'à ce qu’il atteigne sa limite maximale.
3. Si vous appuyez et maintenez enfoncé le bouton d’autre, un moteur servo se déplace dans le sens antihoraire jusqu'à ce qu’il atteigne sa limite maximale.
3. Si vous appuyez sur un bouton et le relâcherez, un moteur d’asservissement se déplacera un montant fixe dans une direction particulière.
4. Lorsque vous allumez l’Arduino, le servo se réinitialise sa position au milieu de l’arc de mouvement
Choses, que j’ai dû faire attention :
1. essayer de forcer le moteur servo pour continuer à avancer dans une seule direction, lorsqu’il a atteint sa limite maximale, pourrait l’endommager.
2. attacher trop de servos pour tension secteur 5v de l’Arduino pourrait endommager les composants sur la Ardiuno, donc j’ai besoin pour alimenter les moteurs servo à l’extérieur.
3. obtenir ligoté avec tous ces câbles ! J’ai besoin d’être en mesure d’étendre leur longueur pour augmenter la flexibilité de positionnement et de ranger les câbles éloignés les boutons.






 de LEDSs")






")