Salut. Il s’agit de mon premier instructable, alors j’espère que vous sera patient avec moi si je fais des erreurs de mise en place. Il est écrit pour les débutants comme moi, alors le plus avancé parmi vous pouvez sauter beaucoup de cela et juste arriver à câblage il vers le haut.
L’objectif que je me suis fixé était de pouvoir commander le robot montré dans ce site web :
http://bocabearingsworkshop.blogspot.co.ID/2015/08...
J’avais besoin de pouvoir contrôler 3 servomoteurs différents en modifiant la position de 3 potentiomètres. Il y beaucoup de gens font des choses comme ça, mais je ne pouvais pas trouver une correspondance exacte pour tout ce que j’avais besoin, alors j’ai décidé de poster ce instructable pour apporter tout ce que j’ai appris ensemble en un seul endroit afin que tous ceux qui voulaient faire quelque chose comme ça pouvait l’obtenir rapidement opérationnel. Cette instructable est vraiment un résumé des autres peuples excellent travail et d’efforts.
Avant que je liste les étapes individuelles impliqué dans cela, je veux donner une explication rapide de comment tout fonctionne.
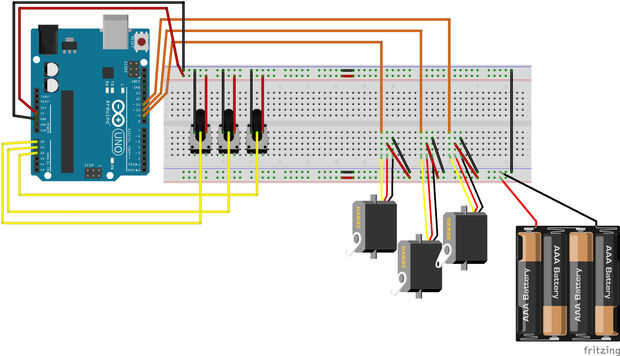
Les potentiomètres envoient un signal analogique à l’Arduino. Le croquis sur l’Arduino (plus sur cela plus tard) puis convertit l’entrée depuis le potentiomètre en sortie numérique analogique et envoie cette sortie au moteur servo qui déplace ensuite la gauche ou la droite du montant approprié.
Les potentiomètres sont alimentés par la ligne de 5v de l’Arduino, alors que les servos obtiennent leur puissance de la batterie.
Remarque importante : il est très important pour justifier l’Arduino dans les pack batterie/servos pour éviter les mauvaises choses de se produire, mais je vais en parler plus en détail que nous avançons.












