Étape 1: ingrédients
-un traitement IDE
-beaucoup de LEGO (meilleur jouet jamais!)
-un moteur pas à pas
-un conducteur de moteur pas à pas et alimentation
-un laser linéaire
-une webcam
-un travail Meshlab
et d’aide:)
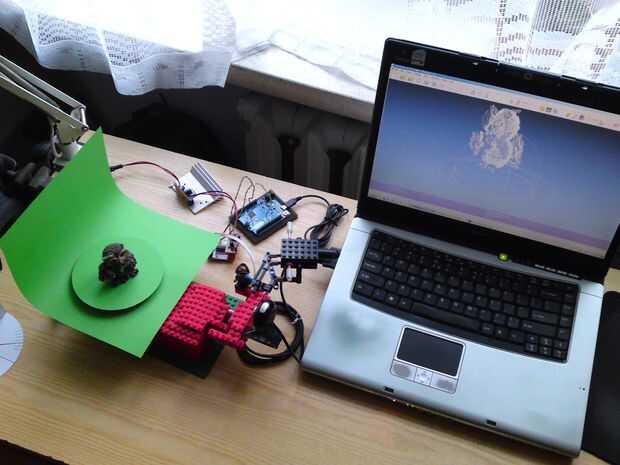
Tout d’abord, vous devez obtenir toutes les pièces et de réfléchir à l’aspect global et méthode de travail.
Et ça dépend le plus du type de moteur pas à pas, que vous pouvez obtenir. J’ai obtenu mon stepper de vieille imprimante OKI qui a attaché ensemble de pignons. Il a été très utile, parce que je pourrais fixer la poulie de Lego, sans le détruire définitivement. En fait, je n’avais pas détruit tout Lego blocs lors de construction de la plate-forme tournante. Je déteste la destruction des choses.
Le code est primitif, je le sais. Il a de grandes erreurs, algorithmes pas tous nécessaires sont appliqués. Mais il génère des nuages de points, qui sont très semblables à des choses vraies et c’était le but de cette version alpha du scanner.
Nous allons donc préparer les pièces.













