Etape 11 : Faire le 2 axes cardan sans balais avec Arduino
Nous avons obtenu le seul axe cardan Brushless avec Arduino sur un banc d’essai, qui fonctionne comme prévu au début de ce projet. Maintenant le cardan axe multiples d’utilisation pratique pourraient être fait. Ici 2 axes de cardan Brushless avec Arduino est fabriqué et testé.
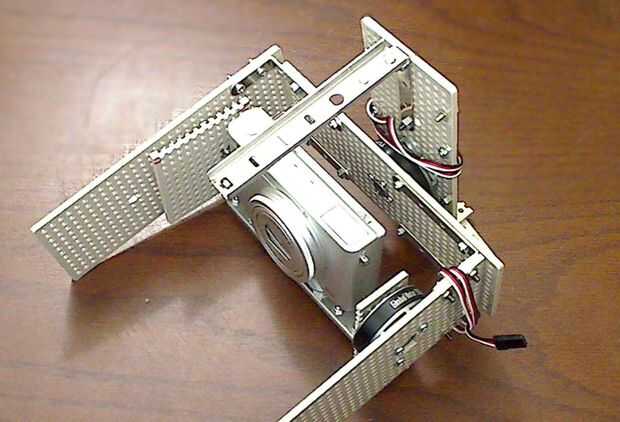
Il compense la rotation non prévue autour de deux axes : TILT (en regardant vers le haut/bas) et ROLL (rotation horizontale). Il a besoin de deux moteurs et six broches avec PWM. Donc, dans cette étape une riche carte Arduino, MEGA, est utilisé au lieu de UNO. Les principaux matériaux pour construire le cadre de ce cardan sont des plaques en plastique et supports en acier inoxydable. L’ancienne plaque est une marchandise pour hobby nommé "Plaque universelle". Il a de nombreux trous d’épingle régulières et a besoin d’aucun outil spécial à couper et ainsi de suite.
:
Les deux prochains points prennent beaucoup de temps pour construire le cadre.
- Bon matériel pour le montage de l’appareil photo de chasse
- Installer une paire de broches et de trou d’épingle pour l’axe d’inclinaison
Dans le premier cas, certaines barres en acier plat avec piqûres régulières est recherché, qui est adapté pour le centre de gravité de la caméra et pour les microperforations existantes sur le cadre. En revanche ce dernier ouvrage doit être équipé d’un appareil plus grand que la GoPro.
Généralement un moteur Brushless fonctionne comme une bonne paire de broche et sténopé sur axe arbitraire. Il prend en charge un cantilever en soi. Si une caméra ultra légère comme GoPro pourrait être montée sur un cantilever avec peu de problèmes. Mais en porte-à-faux ne pouvait pas soutenir un appareil plus grand bien. D'où une paire de broches et de trou d’épingle doit être montée sur l’axe à l’opposé du moteur à travers la caméra. La broche, sténopé et le moteur devraient fournir une bonne paire de supports sur l’axe d’inclinaison pour tourner caméra en douceur sans petit jeu.
:
Une fois que le cadre est construit, les 2 axes de cardan Brushless avec un programme augmenté pour deux axes devient disponible pour tester. Cette naïve cardan a deux problèmes comme suit. Le détail et la cause d’eux et les contre-mesures à ces problèmes sont décrits dans la dernière étape.
- Bavardages du cadre
- Partial sortie de gyroscope à Arduino : perturbation sur l’interface SPI
La plupart des composants électriques de la cardan faites ici est branchée sur un montage d’essai sans soudure et reliée à Arduino, gyroscope ou moteurs par fils de raccordement encore.
Dans le documentaire (13) ci-dessous, nous pouvons voir le 2 axes cardan testé ici est au travail, qui est donné quelques contre-mesures aux problèmes ci-dessus et permis TILTing intentionnelle de plus. Dans cette vidéo le cardan semble bien fonctionner.
:
[Documentaire (13)] 2 axes cardan sans balais avec Arduino fonctionne (1)
:
En revanche, dans le documentaire (14) ci-dessous, on peut observer non seulement le travail de cardan, mais aussi des film tourné par la caméra sur le cardan dans une image. Cette vidéo montre qu’il reste peu de place pour améliorer l’indemnisation à rouler (rotation horizontale).
:
[Documentaire (14)] 2 axes de cardan sans balais avec Arduino de travail (2)













