Étape 2: câblage
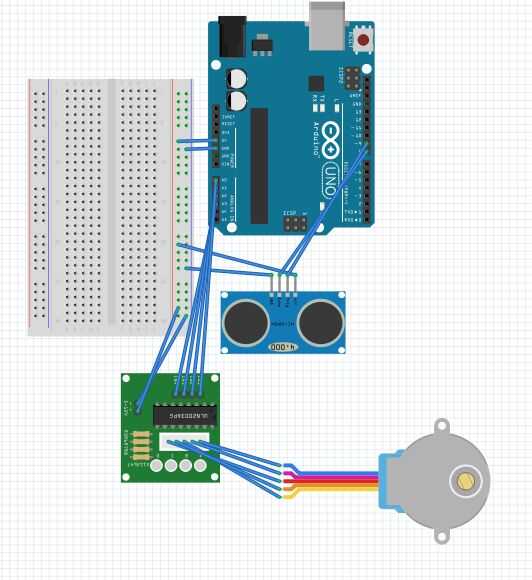

Le fichier schématique est inclus ci-dessous.
Le code à télécharger inclut les fichiers de bibliothèque pour le capteur de proximité et le code d’implémentation pour le distributeur lui-même. Les fichiers sont ci-dessous.
Connecter l' Arduino dans l’ordinateur et télécharger l’esquisse du programme Arduino.
De l’Arduino, fils de son alimentation de 5V et de masse dans le montage d’essai.
Raccorder le capteur de proximité par le biais de la boîte dans le couvercle.
Son SCR et sol pins va dans le montage d’essai.
Les tiges de Trigger et Echo sont spécifiques au code, mais le code fourni spécifient que sa connexion Echo est raccordée à la broche 8 sur l’Arduino Uno et déclencheur est raccordée à la broche 9.
Le moteur pas à pas est branché sur le contrôleur, où son alimentation et masse sont également raccordées à la maquette dans leurs liens respectifs.
TN1 en broche analogique 14 0 ou pin.
TN2 en broche analogique 1 ou broche 15.
TN3 en broche analogique 16 2 ou pin.
TN4 en broche analogique 17 3 ou pin.
Enfin, si vous utilisez une batterie de 9V comme source d’alimentation , connectez-le au port d’alimentation de l’Arduino. Si vous utilisez la connexion USB à l’ordinateur, terminer cette connexion au lieu de cela.
![]()
![]()
![]()
![]()














