Étape 10 : Assembler/Firmware Conseil Mega 2560 et rampes 1.4

On suppose que vous avez installé l’Arduino software ("Arduino IDE" à l’avenir) et préparé votre powersource lors des étapes précédentes.
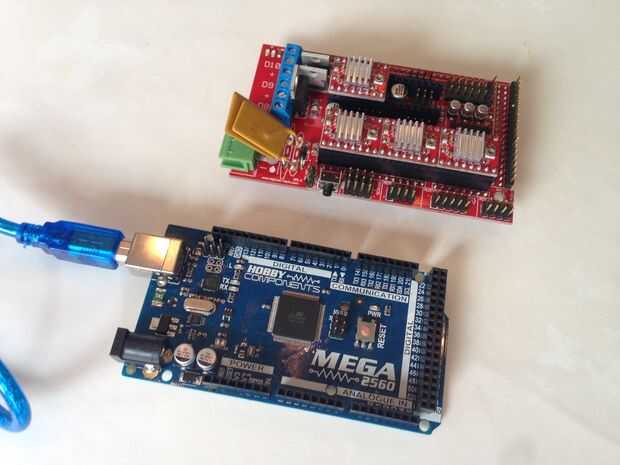
Assembler la Mega 2560 R3 et rampes 1.4
Débrancher le Conseil Mega 2560 et déconnecter tout powercords que vous pourriez avoir sur le 1.4 de rampes.
J’ai enlevé les planches de moteur que j’ai trouvé que j’avais besoin de fixer des pressions assez fermes, mais même, sur le dessus de rampes 1.4 Conseil faire se connecter correctement.
Il faut être vraiment très vigilant car il y a beaucoup de pins que tous doit descendre dans les prises femelles sur les rampes 1.4 Conseil. J’ai eu une poignée de broches tordues qui était perceptible et l’ensemble de la ligne supérieure devait être poussa doucement vers l’intérieur aussi bien !
J’ai également besoin de raccourcir certaines des broches sous delayed sur le 1.4 rampes comme ils lève vers le haut de posé sur le pouvoir-Canon sur le plateau de r3 Mega 2560. Peu importe qu’ils touchent, mais mon conseil d’administration s’est élevé à beaucoup !
Du côté positif, cependant, est le fait que le jury de rampes d’accès ne peut être installée une seule façon.
Après l’assemblage vous :
- Insérez les rampes 1.4 le delayed vert (12v11a/12v5amp).
- Vérifiez les fils correspond à l’entrée + et -
- Allumez le bloc d’alimentation.
- Connectez la clé USB à votre ordinateur.
N’importe quoi ce que vous séquence do 3 et 4...
Mises en garde
Marche arrière ou autrement mal brancher l’alimentation peut détruire vos appareils électroniques et causer des risques d’incendie.
Insérer incorrectement pilotes stepper détruira votre électronique et causer un risque d’incendie.
Toujours s’assurer que l’alimentation et USB est déconnecté lors du retrait ou de réglage des pilotes de moteurs pas à pas. Assurez-vous d’Insérer des pilotes en orientant correctement et dans la prise correctement. Petit potentiomètre réglable loin de powerinput.
La butée épingles pourraient avoir une autre disposition votre butées ou Conseil d’administration, alors assurez-vous de les câbler correctement.
Ne fixez Arduino/rampes avec conducteurs vis à travers les deux trous de fixation. La vis peut couper en la trace positive créant un haut court actuel.
Télécharger le logiciel
Nous allons utiliser la RepRap Marlin (pas un lien pour le télécharger, mais en fait un wiki avec des instructions étape par étape si vous faites défiler jusqu'à « pensant et compilation ») logiciels (c’est en fait un firmware) parmi les nombreux autres firmwares (une liste uniquement) là-bas.
Il faut télécharger le firmware sur le jury R3 Mega 2560 avant que nous puissions commencer en profitant de notre Conseil de rampes 1.4. Le firmware de Marlin est code qui transforme le Mega 2560 r3 Conseil en une imprimante 3D (essentiellement).
Il y a une bonne description ici, si vous voulez un autre angle que ce que j’écris.
Une autre personne fait un guide que j’ai trouvé utile aussi bien.
Téléchargez le Firmware de Marlin
Aller et télécharger l' imprimante 3D Marlin Firmware, qui est la version 1.0.2 a ce jour et le placer quelque part que vous pouvez le trouver.
Cliquez sur le Téléchargement Zip sur le côté droit. Voir mes images ici si vous ne le trouvez pas.
Le fichier téléchargé se nomme Marlin-Development.zip qui va créer un dossier nommé Marlin-développement lorsque vous le décompresser. Placez-la à un endroit convenable comme le Bureau.
Programme d’installation du Firmware de Marlin au programme Arduino
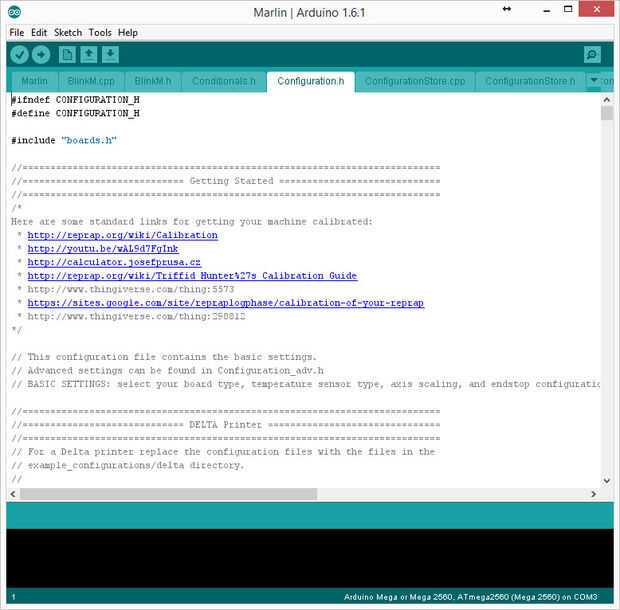
- De l’intérieur de l’IDE Arduino : fichier -> Ouvrir
- Accédez à votre dossier de Marlin-développement et dans le dossier de Marlin .
- Sélectionnez et ouvrez le fichier Configuration.h ou Marlin.ino (tous deux ouvre un ensemble d’onglets/esquisses, donc n’importe qui vous choisissez).
- Une nouvelle fenêtre s’ouvre contenant le Marlin.ino. Fermer la fenêtre autres/vieux.
- Vous avez beaucoup d’onglets dans la fenêtre ouverte. Sélectionnez l’onglet Configratuin.h - voir les images.
Définition de carte mère que les rampes 1.4 avec accessoires.
Nous devons définir quel carte mère que nous utilisons. Vous pouvez voir tous les types de chambre disponibles dans le fichier boards.h .
De nombreux guides sur le web nous disent à modifier à planches. ou fichier de broches ou similaire, pour définir la carte mère. Nous n’avons pas à faire ça. Les variables que nous avons besoin sont toutes placées dans Configuration.h
- Configuration.h -> Appuyez sur CTRL + F pour ouvrir la fenêtre Rechercher et écrire des rampes
- Cliquez sur trouver pour trouver la ligne contenant : #define carte mère...
- Ici, nous avons besoin de qualifier notre Conseil PR. définitions dans le fichier boards.h . En dehors de la définition que nous utilisons une planche de rampes d’accès, c’est la les appareils connectés à la D8 (chaleur-lit), D9 (fan) et D10 (chauffage), nous définissons ici. E est pour extrudeuse, F pour ventilateur, B pour lit.
- Assurez-vous que la ligne se lit : #define carte mère BOARD_RAMPS_13_EFB
- Dire, nous avons eu deux ventilateurs et aucune heatbed nous définirait la dernière partie un EFF à la place.
- Enregistrez le fichier si vous avez fait toutes les modifications.
Définir le débit en bauds, extrudeuses et bloc d’alimentation
Débit en bauds par défaut est de 250000 maintenant. Si elle vous donne des problèmes (avec votre ordinateur) vous pouvez le modifier à 125000.
Ces étapes sont uniquement pour les personnes qui ont besoin de le changer à la configuration de 125000 par défaut.
- Ouvert Configuration.h
- Recherchez la ligne contenant le #define BAUDRATE 250000 et mettre deux barres obliques en face d’elle, comme ceci :
#define BAUDRATE 250000 - Sur une nouvelle ligne, vous écrivez :
#define BAUDRATE 125000 - Enregistrez le fichier
Extrudeuses sont par défaut défini en tant que 1, alors que laisser seul.
Power Supply est configuré comme standard ATX. Bloc d’alimentation peut être défini ainsi que X-Box.
Définir les paramètres thermiques
Capteurs de température
Il y a une liste avec options différentes de 20-25 pour chaque capteur. Les options ci-dessous est la liste qui définit nos entrées de capteurs sur le plateau de rampes 1.4.
Par défaut définit SENSOR_0 avec option 1 ce qui signifie qu’il est un / / 1 est 100 k thermistance - meilleur choix pour EPCOS 100 k (4,7 k pullup) ou en d’autres termes : la thermistance standard utilisée pour la température des mesures pour les imprimantes 3D (que je connais).
Le TEMP_SENSOR_0 est votre thermistance chaude-fin.
Les autres capteurs sont configurés avec l’option 0, ce qui veut dire être désactivé.
#define TEMP_SENSOR_0 1
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_3 0
#define TEMP_SENSOR_BED 1
Paramètres de l’appareil de chauffage
Nous devons définir les températures minimale et maximale de notre fin de chaude et chaude-lit
Température minimale
Est tout d’abord les paramètres Minimum, qui sont par défaut à 5, qui est juste pour tester la thermistance fonctionne. C’est à dire: pour s’assurer que les fils ne sont pas fondus ou endommagés etc..
Commentez les 1, 2 et 3 que nous n’avons pas ceux.
Vous obtiendrez une erreur de compilation si vous commentez la BED_MINTEMP (peut-être que si elle a permis aux termes de capteurs de température). Vous pouvez définir MINTEMP comme 0.
#define HEATER_0_MINTEMP 5
#define HEATER_1_MINTEMP 5
#define HEATER_2_MINTEMP 5
#define HEATER_3_MINTEMP 5
#define BED_MINTEMP 5
Température maximale
Nous définissons ici la température maximale pour nos bout chaud et Hot-lit.
Valeurs par défaut :
Chaud : 275
Chaud-lit : 150
Commentez les 1,2 et 3 que nous n’avons pas ceux (pas sûr que vous devez vraiment)
Si vous imprimez ABS, vous voulez le faire environ 230 degrés ou plus.
Enlever les / / sur la ligne avec BED_MAXTEMP si vous installez un lit chauffant.
#define HEATER_0_MAXTEMP 240
#define HEATER_1_MAXTEMP 275
#define HEATER_2_MAXTEMP 275
#define HEATER_3_MAXTEMP 275
#define BED_MAXTEMP 120
Si vous faites des changements plus, vous devez modifier les constantes Préchauffer le chemin plus loin vers le bas dans le fichier où (utilisez CTRL + F) préchauffage pour PLA est cotée à 180 pour hotend et 70 pour lit et ABS est 240/110 respectivement.
Préchauffer les constantes
Ce sont surtout pertinents si vous utilisez un écran LCD, car ces paramètres seront répertoriés comme « Préchauffer le PLA » et « Préchauffer ABS » là-dedans.
C’est une bonne idée d’insérer un commentaire avec les températures d’originales, donc nous n’a pas oublié ceux.
#define PLA_PREHEAT_HOTEND_TEMP 180
#define PLA_PREHEAT_HPB_TEMP 70
#define PLA_PREHEAT_FAN_SPEED 255 / / Insert valeur comprise entre 0 et 255
#define ABS_PREHEAT_HOTEND_TEMP 240
#define ABS_PREHEAT_HPB_TEMP 110
#define ABS_PREHEAT_FAN_SPEED 255 / / Insert valeur comprise entre 0 et 255
Paramètres de l’extrudeuse
Par défaut l’extrudeuse est configurée pour ne démarre pas à moins que le bout chaud est au moins 170 degrés c. Cette fonction est activée par défaut avec PREVENT_DANGEROUS_EXTRUDE et une température minimum de definened par défaut à 170c.
J’ai décommenté ces lignes que je veux tester le moteur de l’extrudeuse d’abord sans y attacher le bout chaud.
N’oubliez pas d’enlever les barres obliques plus tard.
#define PREVENT_DANGEROUS_EXTRUDE
#define EXTRUDE_MINTEMP 170
Définition de butées
Fins de course sont petits contacts/interrupteurs placés à un ou aux deux extrémités de l’axe pour indiquer au système qu'elle doit s’arrêter. Ils peuvent servir pour étalonner automatiquement l’imprimante pour la maison et fin-posistions.
Certaines pièces techniques électroniques de butées sont deja défini comme les différentes configurations de résistance des tractions. Vous pouvez lire sur pull-up-résistances dans le wiki.
Je ne suis pas tout dans les détails donc je pars à la plupart des paramètres par défaut pour l’instant.
Une chose d’importance si : il y a Pullup résistances sur la carte Arduino, qui peut être utilisée, si vous n’avez pas de souder quoi que ce soit en vous-même.
Si vous n’installez pas les butées, vous devez supprimer les barres obliques devant une ou deux lignes selon votre système. J’ai enlevé les deux que je n’ai pas les butées.
#define DISABLE_MAX_ENDSTOPS
#define DISABLE_MIN_ENDSTOPS
Vous pouvez également définir de quelle manière l’imprimante devrait passer à se rendre à domicile posision. Lire dans les directions de mouvement axe ci-dessous.
Directions de mouvement d’axe
Il n’y a aucun moyen réel de savent de quelle façon les lits vont se déplacer, sauf à l’essayer. Après tous les branchements, vous déplacez alle lits à la position centrale et l’un d’eux déplacez un peu. Si elle bouge la mauvaise façon, vous pouvez changer le configuraitons ou échanger les paires de fils sur le 1.4 de rampes - après que vous avez actionné tout et débranché l’USB aussi bien.
Si vous voulez juste changer le fichier de configuration, vous changez false true comme s’adapte à votre système :
/ / L’inversion stepper. Changer (ou inverser le connecteur du moteur) si un axe va le mauvais sens.
faux INVERT_X_DIR #define
faux INVERT_Y_DIR #define
faux INVERT_Z_DIR #define
#define INVERT_E0_DIR faux
Après vos avez configuré les moteurs pour se déplacer de façon correcte, vous devez configurer qui passant les moteurs doivent se déplacer pour se rendre à la position de départ :
/ / Définit la direction de butées lorsque l’autoguidage ; 1 = MAX, -1 = MIN
Si une butée est configurée pour être à la position 0 pour cet axe, le réglage doit ici être -1. Dans le cas contraire, il doit être 1.
#define X_HOME_DIR -1
#define Y_HOME_DIR -1
#define Z_HOME_DIR -1
Je ne pense pas que vous devrez jamais vraiment changer cela? !
Zone d’impression de l’imprimante
Cela définit comment grand une zone nous pouvons imprimer sur. Il est répertorié comme 200mm dans chaque sens comme valeur par défaut, qui est plutôt beaucoup plus que notre imprimante peut faire. Notre machine peut faire autour de 40mm dans chaque direction. Je vais le mettre à 37, juste de commencer à une distance sécuritaire.
/ / Limites de voyage après homing (unités sont exprimées en mm)
#define X_MIN_POS 0
#define Y_MIN_POS 0
#define Z_MIN_POS 0
#define X_MAX_POS 37
#define Y_MAX_POS 37
#define Z_MAX_POS 37
Vous pouvez également définir des lit-mise à niveau, mais il faut jouer avec ça sur votre propre imprimante à aucun sens de celui-ci.
Si vous utilisez un lecteur de disquette pour l’axe Z, c’est autour de 15mm ou plus.
Paramètres du mouvement
Nous devons définir les étapes combien les besoins moteurs à faire afin de déplacer les lits 1 mm.
Nous aurons besoin d’utiliser les valeurs calculées pour imprimante différents axes et extrudeuse. L’ordre est {X, Y, Z, E}
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,4000,500}
#define DEFAULT_AXIS_STEPS_PER_UNIT {215.12,215.12,8034.69,196.52}
Nous définissons le mm/s plus rapides que l’imprimante peut se déplacer. .
#define DEFAULT_MAX_FEEDRATE {300, 300, 5, 25}
#define DEFAULT_MAX_FEEDRATE {100, 100, 2, 25}
Nous devons régler cela. Énumérés sont les paramètres par défaut.
#define DEFAULT_MAX_ACCELERATION {3000,3000,100,10000}
#define DEFAULT_MAX_ACCELERATION {200,200,50,5000}
Nous devons définir à quelle vitesse notre imprimante est autorisé à accèlere. La valeur par défaut pour tous les 3 sont 3000, mais j’ai changer cela pour 100 à démarrage facile.
#define DEFAULT_ACCELERATION 100
#define DEFAULT_RETRACT_ACCELERATION 100
#define DEFAULT_TRAVEL_ACCELERATION 100
Télécharger le firmware sur l’imprimante
Appuyez sur le « tick » (si c’est le mot) icône à gauche de l’icône de flèche pour vérifier le code. Si elle commet une erreur, vous avez besoin trouver et corriger. C’est probablement une faute de frappe ou peut-être un supplément \ ou similaire.
Si cela ne donne pas une erreur mais ne pas vous montrer quoi que ce soit, vous pouvez le copier et le coller dans le bloc-notes ou similaire, pour voir quelle est l’erreur.
Vous pouvez appuyer sur la flèche pour télécharger la configuration de votre imprimante.
Une erreur fréquente que j’ai fait était connectée à mon imprimante avec Pronterface (ou un autre programme de contrôleur USB) comme l’Arduino ne peut pas se connecter à lui dans cette affaire.
")


.")









 - par un patient réussi du corps")