Étape 1: Conception matérielle

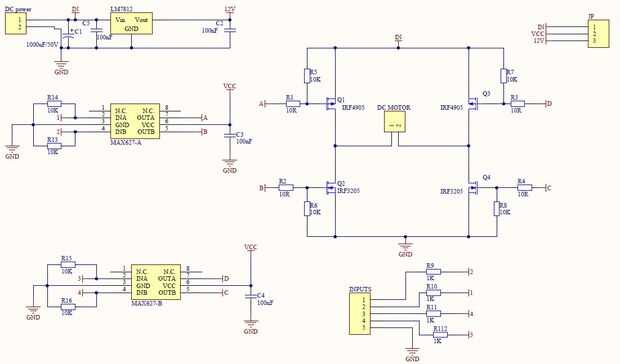
Afin d’être en mesure de contrôler la direction et la vitesse d’un moteur DC je concevoir un pont H avec transistors mosfet complémentaires (IRF3205 + IRF4905) et pour les pilotes, j’ai choisi MAX628 fournies par Maxim Integrated.
Les travaux de pont H de cette façon :
-les transistors de mosfet canal P haut de la fourchette travaillent seulement marche/arrêt ;
-les transistors de mosfet canal N bas côté travaillent avec 15kHz PWM pour contrôle de vitesse.
Cette conception permet de fonctionnement tension jusqu'à 30 V et un courant jusqu'à 10 A (pour plus de courant, vous devez utiliser un dissipateur de chaleur ou des transistors mosfet parallèle).
Si vous souhaitez utiliser cette conception sur la tension de fonctionnement plus élevée, vous devriez faire les modifications suivante :
-changer tous les transistors mosfet avec d’autres qui ont Vds compatible avec la tension souhaitée ;
-Changez le régulateur LM7812 , ou d’alimentation 12V d’une autre manière, car cette tension est utilisée pour fournir des pilotes pour des transistors mosfet et ne doit pas dépasser 18 v, ou vous risquez d’endommager les transistors mosfet.
Afin de commander le moteur, vous devez faire ces étapes :
-pour faire tourner dans un sens, les entrées appelé avec 1 et 4 doivent être réglé sur 5 V (ou 1 logique) pour vitesse maximale ou vitesse commande mode l’entrée 1 doivent être définis à 5 V (ou 1 logique) et l’entrée 4 obtient un signal PWM à la variable duty cycle (les entrées 2 et 3 doivent être mis à 0 logique ou mise à la terre) ;
-pour faire tourner dans l’autre sens, les entrées appelé 2et 3 devoir être réglé sur 5 V (ou 1 logique) pour vitesse maximale ou vitesse commande mode l’entrée 3 doivent être réglés à 5 V (ou 1 logique) et l’entrée 2 obtient un signal PWM à la variable duty cycle (les entrées 1 et 4 doivent être mis à 0 logique ou mise à la terre) ;
-pour frein le moteur, vous devez définir le bas côté ou transistors mosfet côté élevé à 5 V (ou 1 logique), mais uniquement du côté haut ou bas, l’autre doit être défini sur 0 logique ou mise à la terre. Cette méthode courte circuit du moteur et causer le frein.




")








