Dernièrement, j’ai travaillé sur une télécommande sans fil pour un bras robotisé. La plupart des tout est planifié, mais je n’ai pas toutes les pièces et les boucliers encore, alors j’ai décidé de commencer le prototypage avec un seul moteur. J’utilise deux radios Xbee pour communication sans fil. Qu’il sont a 5 moteurs et une LED, il n’ya pas assez broches numériques pour moi de communiquer dans ce chemin, donc suis utilisant des communications série de Arduino 1 > 1 Xbee > Xbee 2 > 2 Arduino.
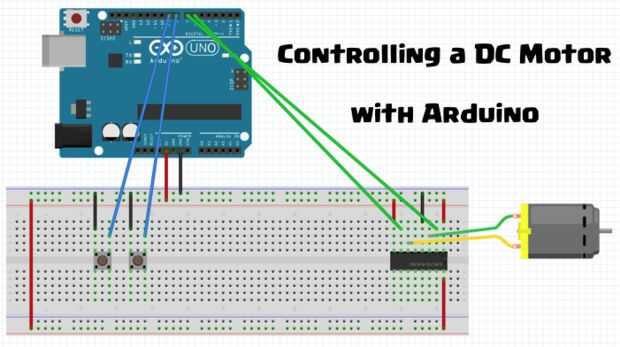
Alors, j’ai décidé de faire des simulations de cela mais avec un Arduino filaire. Dans ce Instructable je fera la démonstration de comment changer sens d’un moteur à courant continu, en utilisant les commandes série et commandes de boutons. Nous allons commencer, doit nous ?



")



")





