Étape 10 : La AtMegas de programmation
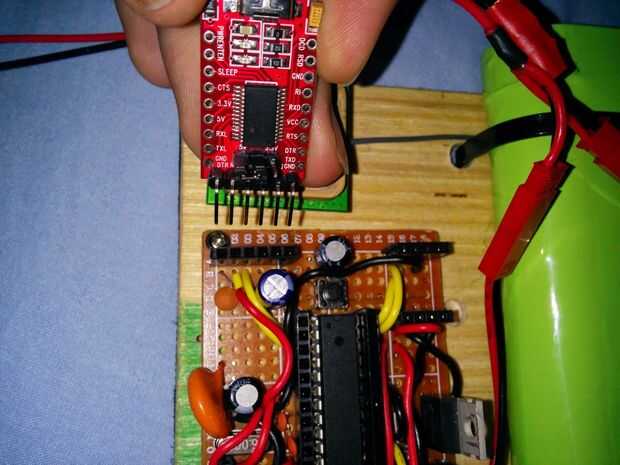

Afin de programmer le AtMegas j’ai utilisé une puce FT232, et tout ce que je devais faire était brancher sur chaque circuit et télécharger l’esquisse approprié à l’aide de l’Arduino software (voir image ci-dessus) comme je le ferais avec un Arduino Uno. La seule différence est que vous devez sélectionner "Arduino Nano w / ATmega328" au lieu de "Arduino Uno" dans Outils > Conseil d’administration. Le code était très semblable au code utilisé dans le troisième prototype.
La première esquisse analysé des données GPS et l’a envoyé le second GPS via une connexion série. L’esquisse serait clignoter la LED sur la broche 13 lorsque données était envoyées et la LED s’illuminera quand il n’y a pas de verrou GPS.
Le deuxième croquis a beaucoup plus de responsabilités. Il prend la position GPS actuelle, calcule la distance entre cet endroit et le point de cheminement suivant, compare le titre au prochain point de cheminement avec le relèvement au compas et commande les moteurs d’y aller. Il y a aussi la fonction de substitution, qui suspend le pilote automatique, bien qu’il y a un signal du récepteur RC. Ce signal est ensuite utilisé pour calculer la vitesse de chaque moteur. Les waypoints influant sur le pilote automatique sont programmées directement dans cette esquisse.
Le deuxième AtMega a également besoin de calibrer la boussole avant de l’utiliser. C’est où j’ai opté pour la bibliothèque compas de helscream , qui effectue l’étalonnage pour moi. Lorsque l’étalonnage est terminé, une LED verte s’allume !
Le sketch que j’ai téléchargée à chaque puce était essentiellement une combinaison de tous mes croquis précédents.
Vous pouvez télécharger tout le code source à la toute dernière étape de ce Instructable !













